







Gewicht ohne Kamera: 395,3 g (+ 11 g für die Kameraschraube)
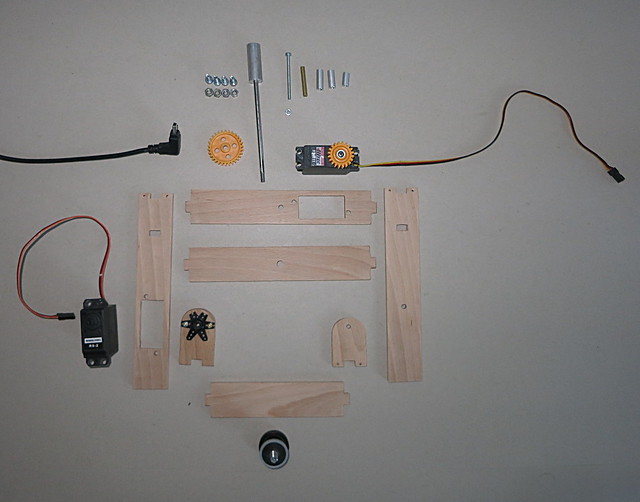
Die Bestandteile
Rahmen aus 30×5 mm Buchenholz, verleimt und verstiftet
2 Standardservos, wobei einer auf “endlos” umgebaut wurde
Kameraschraube , Eigenbau
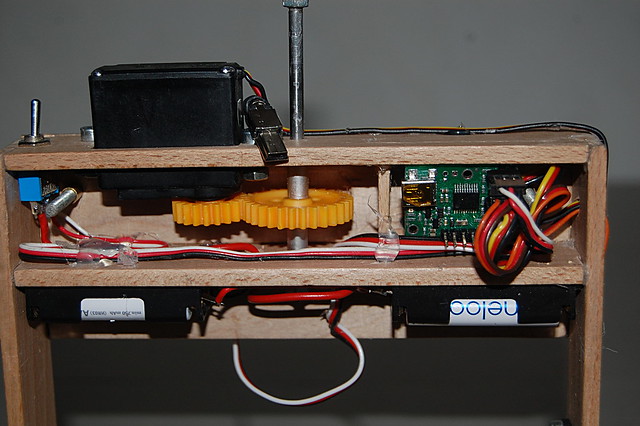
Zahnräder Conrad-Modellbau, 20 Z und 40 Z
Antriebswelle ø 4 mm, St
Ein/Aus-Kippschalter
4x Sanyo Eneloop AA: Spannung: 1,2 Volt, Kapazität: 2000mAh
Pololu Micro Maestro 6-channel USB Servo Controller
USB-Stecker an Servokabel, wobei das Signalkabel mit der +-Leitung und das Massekabel mit der Minus-Leitung verbunden sind (das steht hier nur für mich, da ich laufend nachschlagen muss, wie ich das USB-Kabel bei welcher Steuerung angeschlossen habe 😉 )
diverse Schrauben und Distanzhülsen
Der Bewegungsablauf
wird gesteuert durch ein einfaches Bewegungsprogramm, welches auf dem Micro-Controller ausgeführt wird. (Das Script stelle ich auf Wunsch zur Verfügung, es kann aber leicht auch ohne Programmierkenntnisse selbst erstellt werden.)
- Programm startet nach Betätigen des Ein-/Aus-Schalters automatisch
- Kamera fährt Ausgansposition an, d.h. die Kamera ist leicht nach unten geneigt, damit nicht zuviel Himmel auf dem Bild zu sehen ist. Eine spezielle Ausrichtung in PAN-Richtung erfolgt nicht.
- Auf der Hälfte des 10 Sekunden-Intervalls schickt der Controller das Signal zum Auslösen zum USB-Anschluss der Kamera, wo das CHDK-Programm in der Kamera das Signal weiterverarbeitet. Die Beschreibung hierzu an dieser Stelle
- Am Ende des 10 Sekunden-Intervalls erfolgt eine Bewegung des Tilt-Servos und die Kamera zeigt in einem vorgegebenen Winkel schräg nach unten. Nach 5 Sekunden wird der Befehl zum Auslösen gegeben. Nach weiteren 5 Sekunden erfolgt eine weitere Veränderung des TILT-Anstellwinkels und die Kamera zeigt noch schräger nach unten.
- Der Auslösevorgang wiederholt sich.
- 10 Sekunden nach Anfahren der 3. Position schwenkt die Kamera zurück in die horizontale Ausgangsposition und die RIG wird um ein eingestelltes Winkelmaß gedreht. Hier beginnt der beschriebene Ablauf erneut.
- Das Programm läuft so lange bis es durch Betätigen des Ein-/Aus-Schalters beendet wird oder die Akkus leer sind.
Im Programm können alle gewünschten Werte eingestellt werden, also Zyklendauer, horizontaler und vertikaler Verstellwinkel, Anzahl der Neigepositionen.
Dazu muss nur der Controller mittels USB-Kabel mit dem PC verbunden werden, damit die neuen Werte ins Programm aufgenommen werden können. Sicherlich kann dies nicht auf der Wiese oder am Strand geschehen, wie es etwa durch DIP-Schalter zu realisieren wäre, aber dafür kann jeder gewünschte Wert eingegeben werden. Bei einem bewährten Ablauf werden Änderungen auch nicht so oft vorkommen.
Weiterhin ist geplant, noch 3 Ein-/Aus-Schalter anzubringen und 3 Kanäle des Maestro-Micro-Kontrollers als Eingänge zu konfigurieren. Diese Eingänge fragen die Stellung der 3 Schalter ab und geben damit die Möglichkeiten, aus 8 verschiedenen Bewegungsprogrammen das Programm auszuwählen, welches für die spezielle Aufnahmesituation den geeignesten Bewegungsablauf liefert.
Mal schauen, was daraus wird. Ich werde berichten.
März 2015:
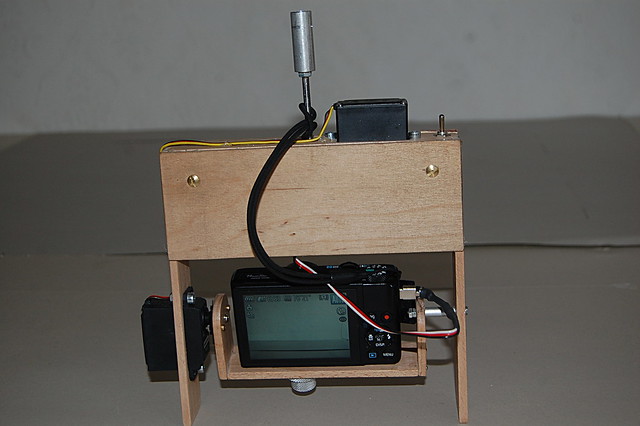
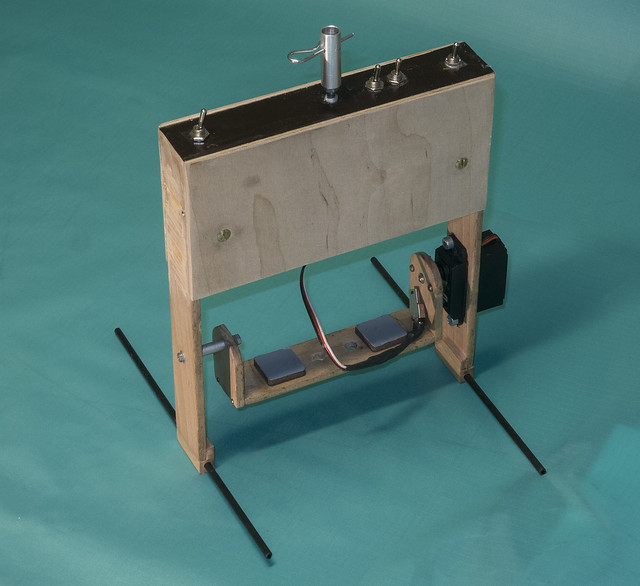
Ich habe mittlerweile die Rig um eine “Etage” nach oben erweitert, um die 3 Schalter unterbringen zu können, da in der bisherige Ausführung der Platz doch recht knapp bemessen war.

Außerdem ist der Servo-Controller an eine andere Stelle gewandert.
Außerhalb des Holzgehäuses sind jetzt nur noch ein Kabel zum Tilt-Servo und das Kabel, welches zum USB-Anschluss der Kamera führt und den Auslösebefehl übermittelt, zu sehen. Somit habe ich mein eigentliches Ziel, alles was sich irgendwo verfangen könnte oder was man abreißen könnte, ins Innere zu verlegen, erreicht.
Das Gewicht der Rig ohne Kamera beträgt 446,6 Gramm und mit meiner Canon S110 (incl. Befestigungsschraube) 665,95 Gramm.
Zum augenblicklichen Zeitpunkt habe ich 3 verschiedene Bewegungsprogramm geschrieben und auch schon getestet. Es sind noch Kleinigkeiten zu ändern, aber es funktioniert alles wie geplant.