






Servo controllers automatically control all servos on a rig without having to rely on an RC controller. I have tried the following two controllers so far and am very happy with both.
Pololu Micro Maestro
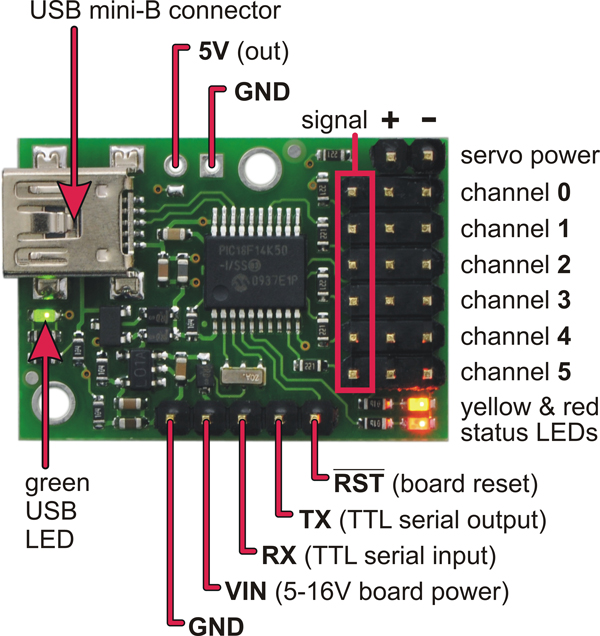
This is the smallest servo controller from Pololu’s second generation of servo controllers. The new generation offers more outputs in less space.
The controllers can be connected directly to a computer via USB, and a serial interface (TTL) is available for use with a microcontroller.
Main features
- Three control methods: USB, TTL (5V) serial, and internal script
- 0.25μs output pulse width resolution (corresponds to about 0.025 ° for a typical servo, which is higher than the servo resolution)
- Configurable pulse rate between 33-100 Hz
- Pulse range from 64 to 3280 μs
- Individual acceleration and speed control for each channel
- The channels can optionally be configured to move to a specific position or to switch off during commissioning or in the event of an error
- The channels can also be used as multi-purpose digital outputs or analogue inputs
- A simple scripting language allows you to program the controller for complex actions, even after USB and serial connections have been removed
- Comprehensive user manual
- A free configuration and the control application for Windows makes it easy:
- configure and test the controller
- Create, execute and save sequences of servo movements for computer animations and walking robots.
- Write scripts, run through them step by step and execute scripts stored in the servo controller
- Two ways to write software to control the Maestro from a PC:
- a virtual COM port makes it easy to send serial commands from any development environment that supports serial communication
- The Pololu USB Software Development Kit enables the use of advanced native USB commands and includes sample code in C #, Visual Basic .NET and Visual C ++.
- TTL serial functions:
- Supports 300-200000 bps in fixed baud mode, 300 to 115,200 bps in autodetect baud mode
- At the same time, it supports the Pololu protocol, which gives access to advanced functions, and the simpler Scott Edwards MiniSSC II protocol (there is no need to configure the unit for a specific protocol mode).
- Can be daisy-chained to other Pololu servo and motor controllers via a single serial transmission line
- Can function as a general-purpose USB-to-TTL serial adapter for projects controlled by a PC
- The Pololu Maestro Arduino library makes it easier to start controlling a Maestro controller from an Arduino or compatible boards like the Pololu A-Star controllers
- The board can be powered from a USB port or from a 5-16V battery, further making the regulated 5V available to the user
- Compact size of 2.16 × 3.05 cm and a light weight of 4.8 g with header
- Upgradeable firmware
AuRiCo made by Peter Engels
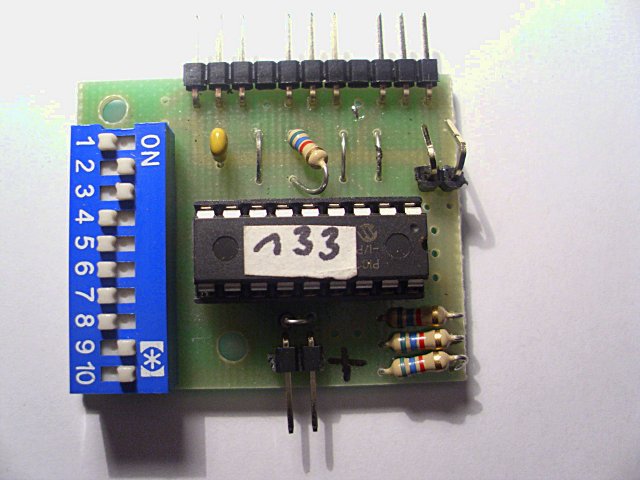
This AutoRigController (AuRiCo) automatically controls all servos on a rig without having to rely on an RC controller.
Different rotation, tilt and release modes can be set. Interval times can be set in a wide range. (2 sec – 4 min)
A programmed Risc MicroController takes over the control.
Configuration is very simple via a switch panel and can be done in a very short time by anyone without a PC or programming knowledge. (in contrast to some other autorig controllers).
All servos of the Graupner, Futaba & Profi (Conrad) systems are supported. Operation with interval cameras and also cameras with manual triggering is possible.
AuRiCo is supplied with 4 AA or AAA cells
(Alkaline or NiCd/NIMH), a supply via 1 Lipo cell is also possible (servo-dependent).
If you want to know more about this controller, you can have a look at Peter Engels’ website.