






Die Einzelteile für diesen Umbau hatte ich schon ein paar Tage hier herumliegen, jetzt habe ich mich endlich mal aufgerafft, alles zusammen zu bauen.
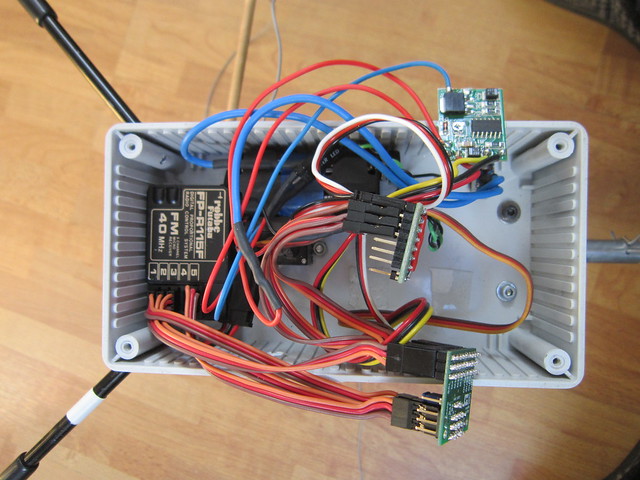
Zur Funktionsweise: schalte ich die Steuerung an der RIG ein startet ein Programm, das automatisch 3 Neigepositionen anfährt und die Kamera auslöst. Nach der 3. Position dreht die Halterung um 20° weiter um wiederum 3 Bilder zu machen. Zuständig für diesen Ablauf ist ein 6-Kanal Servo-Controller von Pololu.
Schalte ich jetzt die Fernsteuerung ein und gebe mittels Schaltknüppel ein Steuer-Signal auf den Pololu 4-Kanal Multiplexer übernimmt die Fernsteuerung das Kommando über den Tilt- und den Pan-Servo und löst die Kamera zum gewünschten Zeitpunkt aus.
Schalte ich das Steuer-Signal ab, läuft die Steuerung wieder mittels Auto-KAP weiter.
Die Auslösesignale für die Canon-Kamera, auf der CHDK läuft, werden mittels eines SMD-Leistungsschalters gewandelt und lösen die Kamera aus, wenn am USB-Eingang 5V anliegen.
Das soll mir helfen,uninteressante Bildbereich während einer 360°-Drehung zu überspringen und nur die interessanten Bereiche automatisch aufzunehmen.
Soviel zur Theorie 😕